
About the Elbow
The elbow joint for a human body is simply a bending joint that has one degree of freedom. Because it is attached to a rotatable arm, you gain a bit more flexibility but the actual joint simply rotates along a single axis. The human elbow has roughly 150 to 160 degrees that it can move with the main limiting factor being hitting the rest of the human arm. A robot would have a similar problem but putting limits in the program for the allowable degrees would solve this issue. Clearly, a servo motor would be the easiest way of implementing this joint.
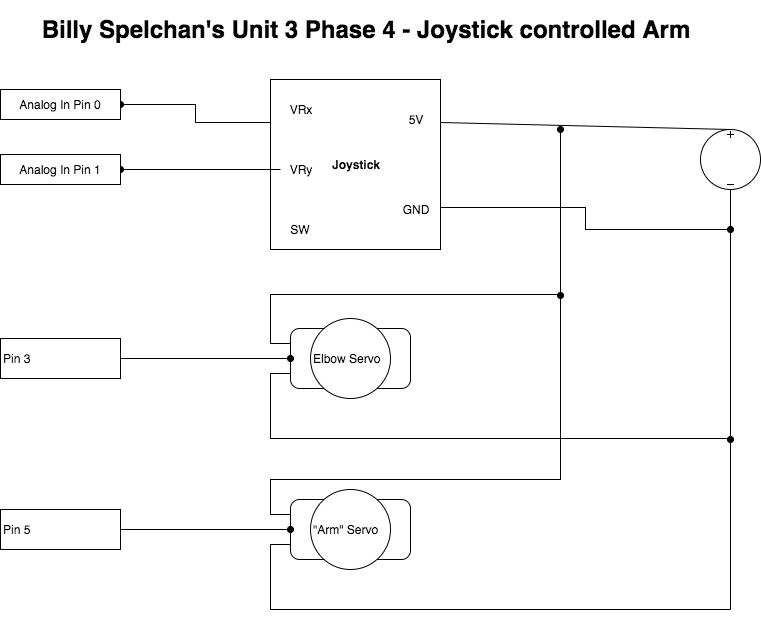
To build this project, it was broken into 4 phases. The first phase was simply to get a servo to work. To gain easier control of the servo, a joystick was tested to see how to read input from the joystick. Phase 3 combined the two circuits. A joystick has two axis’s so for phase 4 a second servo was added to increase the degrees of freedom that the circuit has.
The code for handling this is simple. We have a main loop that checks the joystick to see how it has changed and apply the movements to the servos with code to limit the range of the servos to acceptable portions. My finished project, as seen in the video, has to have a bit of support to work, but as this was just a test, a makeshift holder for the arm was used. Certainly additional motors could be added to give us control of a hand, though the limited pins of the Arduino would hamper the amount of control that